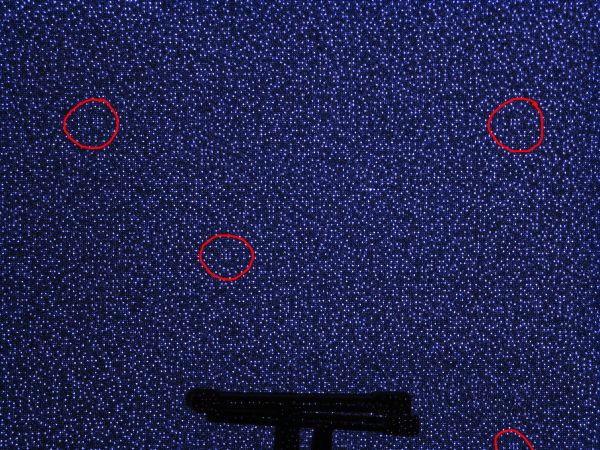
Meanwhile, the reverse engineering of Microsoft Kinect goes on. Future Picture site explores a projection pattern that allows Kinect to sense the depth. The red cycles show repeating elements in the pattern:
The full patten is arranged as 3x3 matrix of dots. Each part has different brightness and centering dot:

Via electronsholes.
Update: The open access Sensors journal published the Stanford University paper titled "Photo-Detectors for Time of Flight Positron Emission Tomography (ToF-PET)". The paper reviews recent advances in time of flight positron emission tomography (ToF-PET) based on two types of photo-detectors: photomultiplier tubes (PMTs) and silicon photo-multipliers (SiPMs) with a special focus on SiPMs.
Any idea about the power of the laser source?
ReplyDeletethis pattern looks like the coding structure from Anoto. Any one can comment this?
ReplyDelete@ "this pattern looks like the coding structure from Anoto."
ReplyDeleteActually, this was my first thought as well. However it should not code each XY position by a unique code like Anoto. The coding length should be just long enough to not repeat itself for the different depths in the specified operating range.
the trick in Primsens method is that they trial the absolute XY pattern position at the calibration phase, then you detect only the relatively pattern shift to get the 3D information. In this way, the lens distortion can be ignored.
ReplyDelete